

전기에너지를 운동에너지로, 전동기의 이야기
- 2025년 2월 16일
- 4분 분량
우리 주변에 스스로 움직이는 것을 찬찬히 살펴보면, 대부분의 물건들은 전동기로 움직인다. 그럼 왜 대부분의 구동기로 전동기를 사용할까? 전동기의 발명 전에는 대부분의 구동기는 증기기관이었다. 증기기관은 열 에너지를 운동에너지로 전환하는 기관이다. 기차를 움직일 만큼 증기기관의 힘은 상당했지만, 기체의 팽창과 수축을 이용한 탓에, 기관의 크기는 매우 컸고, 제어가 어려웠다. 하지만 전동기가 발명된 이후, 상황은 완전하게 바뀌었다. 전기에너지는 기반의 전동기는 생산하기도 쉬웠고, 구동기의 크기도 작았고, 심지어 정확한 제어도 가능했다. 그렇기에 대부분의 구동기는 전동기로 대체되었고, 화학에너지로 작동하던 자동차의 엔진도 현재는 전동기로 작동한다. 로봇공학의 발전도 전동기가 없었으면 불가능 했을 것이다. 그렇지만 대부분의 사람들은 전동기의 존재만 알고, 그 원리와 종류를 모르고 있는 경우가 많다. 그러니 기술의 혁명을 이끈 전동기의 이야기를 한번 들어보자.
전동기의 기본적인 원리
전동기는 회전 운동을 하며 힘을 전달한다. 이 회전운동은 전자기력, 특히 로렌츠 힘에 의해 일어난다. 로렌츠 힘이란 전하량를 가진 물체가 전자기장 안에서 받는 힘이다. 전기모터에서 로렌츠 힘의 크기는 공식

으로 정의되며 여기서 B는 자기장의 크기, I는 전류의 크기, l은 코일의 길이를 나타낸다. 때문의 모터의 힘은 자석의 세기가 강할 수록, 전류의 크기가 클수록, 코일의 길이가 길수록 강해진다. 이 세가지 요소 중 가장 제어하기 쉬운 전류의 세기를 조절하여 모터를 제어한다. 구동기, 즉 전기모터(이하 모터라고 하겠다)의 구조를 단순하게 나타내면 다음 사진과 같다.'

모터의 사각형 코일이 영구자석으로 형성된 자기장에서 전류가 흐르면 로렌츠 힘을 받아서 회전운동을 하게 된다. 자세하게 살펴보면, 모터의 사각형 코일이 계속 회전하기 위해서는 코일에 흐르는 전류의 방향이 계속하여 바뀌어야 한다는 것을 알 수 있다. 하지만 직류 전원에서는 이것이 쉽지 않고, 이를 해결하기 위해서, 축과 코일이 맞닿아 있는 부분(브러시라고 칭한다)에 정류자가 들어가, 모터가 회전함에 따라 전류의 방향을 쉽게 바꿔준다.
이러한 기본 구조를 가진 전동기를 DC 모터(직류 모터) 라고 한다.
전동기의 제어와 서보 모터
앞서 소개한 가장 기본적인 전동기인 DC 모터는 아무런 장비 없이는 제어가 어렵다. 여기서 말하는 모터의 제어는 모터의 회전 속도, 방향, 각도들을 원하는 대로 바꾸는 것을 칭한다. DC 모터의 속도와 방향을 제어하기 위해서는 DC 모터에 걸리는 전압을 바꿀 수 있는 DC 모터 드라이버가 필요하다. DC 모터 드라이버에 DC 모터를 연결하면, 메인 프로세서에서 보낸 신호를 바꾸어 DC 모터의 전압을 조정한다. 추가적인 드라이버가 없으면, DC 모터를 켜고 끄는 것 말고는 제어방법이 없다. 때문에 DC 모터 드라이버를 사용한 제어방식은 주로 회전이 필요한 제품들, 예를 들어, RC카, 선풍기, 등에 쓰이게 된다.
DC 모터 드라이버를 사용한 제어방식의 가장 큰 단점은 바로 피드백 제어가 되지 않는 것이다. 피드백 제어는 인코더라는 각도 센서를 이용하여, 모터가 회전한 다음, 인코더에서 각도를 센싱하고 피드백을 보내, 정확한 각도에 위치하게 하는 제어이다. 피드백 제어를 사용하면 모터의 회전 뿐만 아니라 각도를 제어할 수 있게 된다. 피드백 제어를 적용하여 특정 각도로 제어할 수 있는 모터를 서보 모터라고 한다.

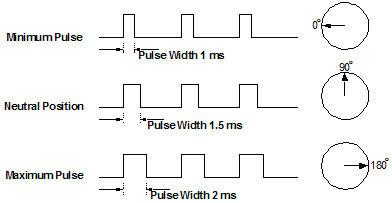
서보 모터는 DC 모터 + 인코더로 이루어진 DC 서보 모터도 있지만, AC 서보모터, BLDC 모터를 이용한 서보 모터가 있듯이, 종류가 굉장히 다양하다. 서보모터는 PWM 신호를 통해서 제어할 수 있다. PWM 신호란, 전압의 ON/OFF 기능을 이용하여 펄스를 만들고, 그 펄스폭의 길이를 바꾸어 통신하는 방법을 말한다. 펄스폭의 길이에 따라, 각도의 크기가 정의되고, 이를 서보모터에 전송하여 특정 각도로 제어할 수 있다.
우리 일상에서 접할 수 있는 대부분의 서보모터는 DC 서보모터이다. 소형 DC 서보모터는 상대적으로 저렴한 가격으로 구할 수 있어, 개인 수준의 프로젝트에서 많이 활용되고 있다. 앞서 설명한 DC 모터에 인코더를 달아서 제어하게 된다. 하지만 DC 서보모터는 회전축 부분에 브러쉬와 축이 만나면서 생기는 마찰 때문에 발열과 소음이 있고 또한 무게에 비해 토크가 낮다는 단점이 있다. 위와 같은 문제점을 해결할 수 있는 모터가 바로 BLDC 모터이다.
BLCD 모터
BLDC 모터, 즉 Brushless DC electric motor는 브러시가 없으면서 DC 모터와 비슷한 작용을 하는 모터를 말한다.

BLDC 모터의 구조는 기본적으로 다음과 같이 생겼다. 기존 DC 모터는 코일이 자기장안에서 회전하는 구조였다면, BLDC 모터는 영구자석이 주위를 둘러싸고 있는 전자석에서 생긴 자기력에 의해서 회전하는 구조이다. 때문에 기존 DC 모터에 코일에 전류를 흘려보내기 위한 브러쉬가 필요가 없다.
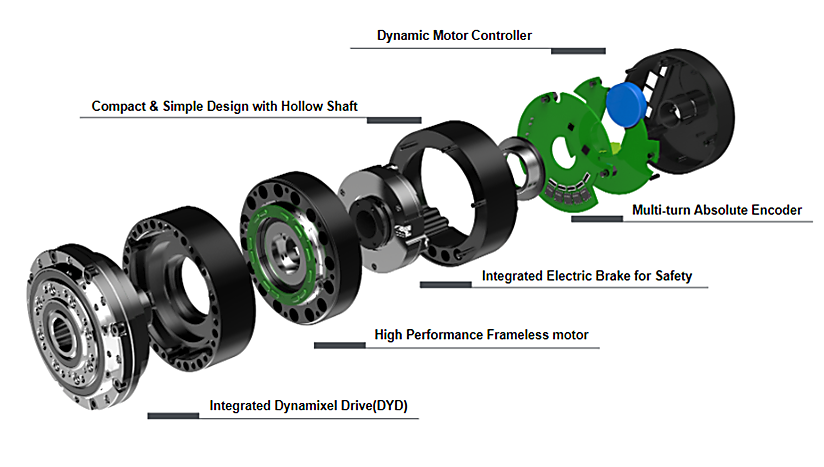
다만 BLDC 모터는 영구자석이 회전하기 위해서는 전자석에서 나오는 자기력의 방향을 계속 바뀌야 하므로 이를 제어하기 위한 모터 드라이버와 회전의 위치를 측정하기 위한 정밀한 센서가 요구된다. 이러한 조건들을 충족한다면, BLDC 모터는 높은 효율의 성능을 보여준다. 같은 크기, 무게의 브러쉬드 모터 보다 더 높은 rpm, 토크를 낼 수 있기 때문에, 정말로 많이 사용되는 모터이다. 소형으로는 주로 회전익 드론, 소형 선풍기등에 활발하게 쓰인다. 좀 더 큰 사이즈의 BLDC 모터는 세탁기, 진공청소기, 로봇의 액추에이터에 사용된다. DC 서보모터 보다 더욱 정밀하고 역동적인 제어가 가능하기 때문이다.
그렇다고 해서 BLDC 모터가 일반 브러시드 모터에 비해 무조건적으로 좋은 것은 아니다. 앞서 설명한 듯이, 정밀한 드라이버가 없으면 구동을 할 수 없다. 또한 전자석의 자기력으로 제어되는 모터이기 때문에 부하 토크가 매우 강하거나 속도제어의 변화폭이 매우 큰 경우에는 브러쉬드 모터보다 응답속도가 느리다는 단점이 있다. 모터 내부의 구조도 브러쉬드 모터보다 복잡하여, 가격도 비싼 편이다.
스텝모터
또 다른 DC 모터의 종류로는 스텝모터가 있다.

다음과 같은 구조를 가진 모터인데, 기본적인 구조는 BLDC 모터의 구조와 동일하다. 다만 고정자와 회전자가 톱니로 맞물려 있어, 톱니의 스텝만큼씩 움직인다. 연속적으로 회전하는 것이 아니라 각 스텝에 맞추어서 불연속적으로 회전하여 따로 위치, 속도제어를 위한 센서가 필요하지 않고, 정밀한 회전을 할 수 있다. 스텝모터는 DC 모터와 BLDC 모터에 비해 토크도 낮고, 속도도 낮다. 하지만 스텝에 맞추어서 회전한다는 특징 때문에 스텝모터는 다른 모터들에 비해서 높은 안정성과 낮은 진동을 가진다. 이 때문에 모터 자체의 수명도 높은 편이다. 이러한 특징 때문에 스텝모터는 주로 3D 프린터에 쓰인다. 3D 프린터는 필라멘트를 녹여 아주 오랜 시간동안 정밀하게 필라멘트를 쌓아야 한다. 때문에 오랜 시간동안, 적은 진동으로 정밀하고 안정적인 모터 움직임이 요구되는데, 이를 완벽하게 충족시키는 모터가 스텝모터이다. 이 외에도 스텝모터는 그 안정성과 정밀함 때문에 다양한 CNC 기계에 사용된다.
이렇듯 기본적인 DC 모터부터 시작해서, 서보모터, BLDC 모터, 스텝모터까지 알아보았다. 이 기사를 읽고 나면 앞으로 다양한 전동기를 볼때마다, 그 전동기는 무슨 전동기인지 알아보는 소소한 재미가 생길 것이다.
이소민 학생기자 | Physics | 지식더하기
참고자료
첨부 이미지 출처




댓글